Finite difference methods for stationary elliptic equations
Finite difference methods for stationary elliptic equations
Second-order linear partial differential equations are classified as either elliptic, hyperbolic, or parabolic, with this naming convention inspired by the classification of conic sections or quadratic forms.
The most fundamental examples of elliptic PDEs are the elegant Laplace equation (written here in two dimensions):
$$ -\Delta u(x,y)=-\frac{\partial^2u}{\partial x^2}(x,y)-\frac{\partial^2u}{\partial y^2}(x,y)=0, $$and its inhomogeneous counterpart, the Poisson equation:
$$ -\Delta u(x,y)=-\frac{\partial^2u}{\partial x^2}(x,y)-\frac{\partial^2u}{\partial y^2}(x,y)=f(x,y), $$where $f$ is a given source function.
In this article, we’ll explore the numerical solution of the Poisson equation using finite difference methods and see how these powerful techniques can be implemented efficiently.
Let’s begin by importing the necessary libraries:
import numpy as np
# To draw matplotlib plots within this notebook.
%matplotlib inline
import matplotlib.pyplot as plt
from python_code.nord_cmap import *
import scipy.linalg as linalg
The Poisson equation in 1D with homogeneous Dirichlet boundary conditions
We’ll first tackle the numerical solution of the one-dimensional Poisson equation with homogeneous Dirichlet boundary conditions:
$$ \begin{cases} &-u''(x)=f(x),\ x\in(a,b), \\ &u(a)=0, u(b)=0, \end{cases} $$where $a$ and $b$ are real numbers with $a The finite difference approach discretizes this problem by computing values $u_0,\dots,u_N$ (where $N$ is a positive integer) that satisfy:
$$
\left\{\begin{align*}
&-\frac{1}{(\Delta x)^2}(u_{j+1}−2\,u_j+u_{j−1})=f(x_j),\ j=1,\dots,N-1,\\
&u_0=u_N=0,
\end{align*}\right.
$$ Here, $\Delta x=\frac{b-a}{N}$ is the uniform grid spacing and $x_j=a+j(\Delta x)$ for $j=0,\dots,N$ are the gridpoints. The values $u_0,\dots,u_N$ approximate the exact solution $u(x_0),\dots,u(x_N)$ at these points. For $N>2$, we can express this system in matrix form:
$$
\left\{\begin{align*}
&AU=B,\\
&u_0=u_N=0,
\end{align*}\right.
$$
where
$U=\begin{pmatrix}u_1\\\vdots\\u_{N-1}\end{pmatrix}$
,
$B=\begin{pmatrix}f(x_1)\\\vdots\\f(x_{N-1})\end{pmatrix}$
,
and the matrix $A$ is a tridiagonal matrix of order $N-1$:
$$
A=\frac{1}{(\Delta x)^2}\begin{pmatrix}2&-1&0&\dots&\dots&0\\-1&2&-1&\ddots&&\vdots\\0&\ddots&\ddots&\ddots&\ddots&\vdots\\\vdots&\ddots&\ddots&\ddots&\ddots&0\\\vdots&&\ddots&-1&2&-1\\0&\dots&\dots&0&-1&2\end{pmatrix}
$$ For demonstration, we’ll set $a=0$, $b=1$, and $f(x)=(2\pi)^2\sin(2\pi x)$, which gives us the exact solution $u(x)=\sin(2\pi x)$. Let’s implement a function to compute the matrix $A$: Let’s verify our matrix construction: Now we’ll solve the linear system using LU decomposition from SciPy’s linalg module: With our solver ready, let’s compute and plot the solution for $N=50$: Now we can visualize how well our numerical solution matches the exact solution: Next, let’s consider the Poisson equation with non-homogeneous Dirichlet boundary conditions:
$$
\left\{\begin{align*}
&-u''(x)=f(x),\ x\in(a,b),\\
&u(a)=\alpha,\ u(b)=\beta,
\end{align*}\right.
$$
where $\alpha$ and $\beta$ are non-zero constants. When dealing with non-homogeneous boundary conditions, we need to modify our linear system. The boundary values now appear on the right-hand side of the equations for the first and last interior grid points. Let’s solve this specific problem:
$$
\left\{\begin{align*}
&-u''(x)=-\frac{2}{(1+x)^3},\ x\in(1,2),\\
&u(1)=\frac{1}{2},\ u(2)=\frac{1}{3},
\end{align*}\right.
$$
which has the exact solution $u(x)=\frac{1}{1+x}$. Now let’s solve another problem with non-homogeneous boundary conditions:
$$
\left\{\begin{align*}
&-u''(x)=1,\ x\in(1,2),\\
&u(1)=1,\ u(2)=2.
\end{align*}\right.
$$ The analytical solution to this problem is $u(x) = -\frac{1}{2}x^2 + \frac{5}{2}x - 1$. Finally, let’s examine the Poisson equation with homogeneous Neumann boundary conditions:
$$
\left\{\begin{align*}
&-u''(x)+u(x)=f(x),\ x\in(a,b),\\
&u'(a)=0,\ u'(b)=0,
\end{align*}\right.
$$ To handle these conditions, we can use forward and backward finite differences at the boundaries:
$$
u'(a)\simeq\frac{u(a+\Delta x)−u(a)}{\Delta x},\ u'(b)\simeq\frac{u(b)−u(b-\Delta x)}{\Delta x},
$$ This leads to the following scheme:
$$
\left\{\begin{align*}
&\frac{1}{\Delta x^2}(u_{j-1}-2\,u_j+u_{j+1})+u_j=f(x_j),\ j=1,\dots,N-1,\\
&\frac{u_1−u_0}{\Delta x}=0,\ \frac{u_N−u_{N-1}}{\Delta x}=0.
\end{align*}\right.
$$ We can express this as a matrix system:
$$
\left\{\begin{align*}
&(\tilde{A}+I_{N-1})U=B\\
&u_0=u_1,\ u_N=u_{N-1},
\end{align*}\right.
$$ where $\tilde{A}$ is the modified matrix:
$$\tilde{A}=\frac{1}{(\Delta x)^2}\begin{pmatrix}1&-1&0&\dots&\dots&0\\-1&2&-1&\ddots&&\vdots\\0&\ddots&\ddots&\ddots&\ddots&\vdots\\\vdots&\ddots&\ddots&\ddots&\ddots&0\\\vdots&&\ddots&-1&2&-1\\0&\dots&\dots&0&-1&1\end{pmatrix}
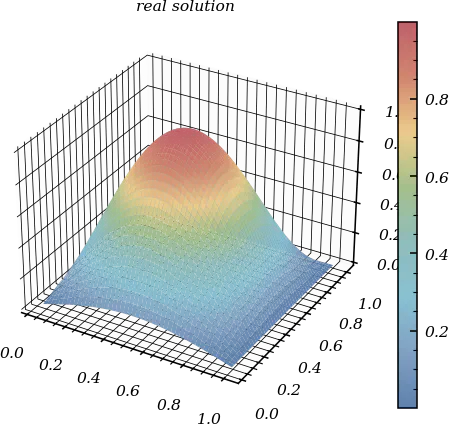
$$ Let’s implement this: For this example, we set $f(x)=((2\pi)^2+1)\cos(2\pi x)$, which gives the solution $u(x)=\cos(2\pi x)$. Let’s verify the convergence rate: The first-order approximation of the boundary conditions limits the overall convergence rate. To achieve second-order convergence, we need a more accurate approximation at the boundaries. Using Taylor expansion, we can derive a second-order approximation for the Neumann boundary conditions: This leads to an improved scheme: Let’s apply this improved method: With the second-order approximation of the boundary conditions, we now achieve the expected second-order convergence for the entire method. Let’s extend our approach to the two-dimensional Poisson equation with homogeneous Dirichlet boundary conditions on a square domain: where $\Omega=(a,b)\times(a,b)\subset\mathbb{R}^2$ and $f:\Omega\to\mathbb{R}$ is a given function of class $\mathscr{C}^2$. We discretize the domain with uniform spacing $h=\Delta x=\Delta y=\frac{b−a}{N}$ and approximate the Laplacian with the five-point stencil: for the interior points $i,j=1,\dots,N-1$. The resulting linear system can be expressed in matrix form as $AU=B$, where $A$ has a block structure: with $I_{N-1}$ being the identity matrix of order $N-1$ and $C$ the tridiagonal matrix: Let’s implement this using the Kronecker product for efficient matrix construction: For our example, we set $f(x,y)=2\pi^2\sin(\pi x)\sin(\pi y)$, which gives the exact solution $u(x,y)=\sin(\pi x)\sin(\pi y)$. The 2D method also achieves second-order convergence, but the computational cost increases significantly with the grid size. For an $N \times N$ grid, the matrix size is $(N-1)^2 \times (N-1)^2$, which grows rapidly with $N$. The runtime increases approximately cubically with the number of points in each dimension ($N$), which is expected due to the $O(n^3)$ complexity of dense matrix operations where $n = (N-1)^2$. Fortunately, the matrix $A$ is a banded matrix with only four non-zero diagonals, making it an excellent candidate for sparse matrix representations. Let’s implement a sparse version using SciPy’s sparse library: In conclusion, finite difference methods provide powerful tools for solving elliptic PDEs like the Poisson equation. When implemented correctly, they achieve second-order convergence and can be made computationally efficient through sparse matrix techniques. These methods form the foundation for more advanced numerical approaches to PDEs and have wide applications in science and engineering.a = 0
b = 1
def compute_system(N):
Delta_X = (b - a) / N
diag_1 = [-1 for k in range(N-1)]
diag_2 = [2 for k in range(N)]
diag_3 = [-1 for k in range(N-1)]
M = np.diag(diag_1, -1) + np.diag(diag_2, 0) + np.diag(diag_3, 1)
return 1 / Delta_X ** 2 * M
A = compute_system(5)
A
array([[ 50., -25., 0., 0., 0.],
[-25., 50., -25., 0., 0.],
[ 0., -25., 50., -25., 0.],
[ 0., 0., -25., 50., -25.],
[ 0., 0., 0., -25., 50.]])
from scipy.linalg import lu_factor, lu_solve
def finite_difference_method(B):
A = compute_system(len(B))
lu, piv = lu_factor(A)
U = lu_solve((lu, piv), B)
return U
X = np.linspace(0,1,50)
B = np.sin(2 * np.pi * X) * (2 * np.pi) ** 2
U = finite_difference_method(B[1:-1])
U = np.array([0, *U, 0])
fig, ax = plt.subplots()
color = color_list(2)
ax.plot(X, np.sin(2 * np.pi * X), color = color[0], lw = 1, label = 'real solution')
ax.plot(X, U, 'o', lw = 1,color = color[1], label = 'approx solution', markersize = 2)
ax.legend()
ax.set_xlabel('x')
ax.set_ylabel('u')

The Poisson equation in 1D with non-homogeneous Dirichlet boundary conditions
X = np.linspace(1,2,50)
B = - 2 / (1 + X) ** 3
B[1] += 1/2 * 48 ** 2
B[-2] += 1/3 * 48 ** 2
U = finite_difference_method(B[1:-1])
U = np.array([1/2, *U, 1/3])
fig, ax = plt.subplots()
color = color_list(2)
ax.plot(X, 1 / (1 + X), color = color[0], lw = 1, label = 'real solution')
ax.plot(X, U, 'o', lw = 1, color = color[1], label = 'approx solution', markersize = 2)
ax.legend()
ax.set_xlabel('x')
ax.set_ylabel('u')

X = np.linspace(1,2,50)
B = np.ones(shape = 50)
B[1] += 1 * 48 ** 2
B[-2] += 2 * 48 ** 2
U = finite_difference_method(B[1:-1])
U = np.array([1, *U, 2])
fig, ax = plt.subplots()
color = color_list(2)
ax.plot(X, - 1/2 * X **2 + 5/2 * X - 1, color = color[0], lw = 1, label = 'real solution')
ax.plot(X, U, 'o', lw = 1, color = color[1], label = 'approx solution', markersize = 2)
ax.legend()
ax.set_xlabel('x')
ax.set_ylabel('u')

The Poisson equation in 1D with homogeneous Neumann boundary conditions
a = 0 ; b = 1
def compute_Neumann(N):
Delta_X = (b - a) / N
diag_1 = [-1 for k in range(N - 1)]
diag_2 = [2 for k in range(N)]
diag_3 = [-1 for k in range(N - 1)]
M = np.diag(diag_1, -1) + np.diag(diag_2, 0) + np.diag(diag_3, 1)
M[0,0] = 1
M[-1,-1] = 1
return 1 / Delta_X ** 2 * M
def finite_difference_neumann(B):
A = compute_Neumann(len(B)) + np.identity(len(B))
lu, piv = lu_factor(A)
U = lu_solve((lu, piv), B)
return U
X = np.linspace(0,1,100)
B = ((2*np.pi) ** 2 + 1) * np.cos(2 * np.pi * X)
U = finite_difference_neumann(B[1:-1])
U = np.array([U[0], *U, U[-1]])
fig, ax = plt.subplots()
color = color_list(2)
ax.plot(X, np.cos(2 * np.pi * X), color = color[0], lw = 1, label = 'real solution')
ax.plot(X, U, 'o', lw = 1, color = color[1], label = 'approx solution', markersize = 2)
ax.legend()
ax.set_xlabel('x')
ax.set_ylabel('u')

N = np.array([2**k for k in range(2,13)])
error = []
for num in N:
X = np.linspace(0,1,num)
B = ((2*np.pi) ** 2 + 1) * np.cos(2 * np.pi * X)
U = finite_difference_neumann(B[1:-1])
U = np.array([U[0], *U, U[-1]])
error.append(np.max(np.abs(U - np.cos(2 * np.pi * X))))
fig, ax = plt.subplots()
Delta_X = 1 / N
ax.loglog(Delta_X, error, 'o', color = color[-1], marker = '+')
fit = np.polyfit(np.log(Delta_X), np.log(error), 1)
ax.plot(Delta_X, np.exp(fit[1])*((Delta_X) ** (fit[0])), '--',
color = color[0], label = f'fit: y = {fit[0] : .2f} x + {fit[1]: .2f}', lw = .5)
ax.set_xlabel('$\Delta x$')
ax.set_ylabel('error')
ax.legend()

Second-order approximation of the Neumann boundary conditions
def compute_second_order_Neumann(N):
Delta_X = (b - a) / N
diag_1 = [-1 for k in range(N - 1)]
diag_2 = [2 for k in range(N)]
diag_3 = [-1 for k in range(N - 1)]
M = np.diag(diag_1, -1) + np.diag(diag_2, 0) + np.diag(diag_3, 1)
factor = 1/Delta_X / (1 / Delta_X + Delta_X / 2)
M[0,0] = 2 - factor
M[-1,-1] = 2 - factor
return 1 / Delta_X ** 2 * M
def finite_difference_neumann(B):
A = compute_second_order_Neumann(len(B)) + np.identity(len(B))
lu, piv = lu_factor(A)
U = lu_solve((lu, piv), B)
return U
X = np.linspace(0,1,100)
Delta_X = (b - a) / 100
factor = 1 / Delta_X + Delta_X / 2
B = ((2*np.pi) ** 2 + 1) * np.cos(2 * np.pi * X)
B[1] += (1 / (2 * Delta_X) ) / factor * B[0]
B[-2] += (1 / (2 * Delta_X) ) / factor * B[-1]
U = finite_difference_neumann(B[1:-1])
U = np.array([U[0], *U, U[-1])
fig, ax = plt.subplots()
color = color_list(2)
ax.plot(X, np.cos(2 * np.pi * X), color = color[0], lw = 1, label = 'real solution')
ax.plot(X, U, 'o', lw = 1, color = color[1], label = 'approx solution', markersize = 2)
ax.legend()
ax.set_xlabel('x')
ax.set_ylabel('u')

The Poisson equation in 2D
a = 0 ; b = 1
def compute_Poisson_system(N):
Delta_X = (b - a) / N
size = (N-1)**2
diag_1 = [1 for k in range(N - 2)]
diag_2 = [-4 for k in range(N-1)]
diag_3 = [1 for k in range(N - 2)]
C = np.diag(diag_1, -1) + np.diag(diag_2, 0) + np.diag(diag_3, 1)
big_diag_1 = np.diag([1 for k in range(N - 2)],-1)
big_diag_2 = np.diag([1 for k in range(N - 2)],1)
A = np.kron(np.identity(N-1), C) + np.kron(big_diag_1, np.identity(N-1)) + np.kron(big_diag_2, np.identity(N-1))
return -1 / Delta_X ** 2 * A
def finite_difference_2D(B):
A = compute_Poisson_system(len(B)-1)
lu, piv = lu_factor(A)
U = lu_solve((lu, piv), B[1:-1, 1:-1].flatten())
return U
X,Y = np.linspace(0,1,51), np.linspace(0,1,51)
X,Y = np.meshgrid(X,Y)
B = 2 * np.pi ** 2 * np.sin(np.pi * X) * np.sin(np.pi * Y)
U = finite_difference_2D(B)
U2 = B[:1:-1, :1:-1]/(2 * np.pi ** 2)
fig, ax = plt.subplots(1,2, subplot_kw={"projection": "3d"}, layout = 'constrained')
surf_1 = ax[0].plot_surface(X[:1:-1, :1:-1],Y[:1:-1, :1:-1],U.reshape((49,49)), cmap = cmap1)
surf_2= ax[1].plot_surface(X[:1:-1, :1:-1],Y[:1:-1, :1:-1],U2, cmap = cmap1)
ax[0].set_title('approximated solution')
ax[1].set_title('real solution')
plt.colorbar(surf_2, orientation = 'vertical')

import scipy.sparse as sparse
from scipy.sparse.linalg import splu
def compute_Poisson_system_sparse(N):
Delta_X = (b - a) / N
size = (N-1)**2
diag_1 = [1 for k in range(N - 2)]
diag_2 = [-4 for k in range(N-1)]
diag_3 = [1 for k in range(N - 2)]
C = sparse.diags(diag_1, -1) + sparse.diags(diag_2, 0) + sparse.diags(diag_3, 1)
big_diag_1 = sparse.diags([1 for k in range(N - 2)],-1)
big_diag_2 = sparse.diags([1 for k in range(N - 2)],1)
A = sparse.kron(sparse.identity(N-1), C) + sparse.kron(big_diag_1, sparse.identity(N-1)) + sparse.kron(big_diag_2, sparse.identity(N-1))
return -1 / Delta_X ** 2 * A
def finite_difference_2D_sparse(B):
A = compute_Poisson_system(len(B)-1)
lu = splu(A)
U = lu.solve(B[1:-1, 1:-1].flatten())
return U